文|伯朗特机器人
学过中学物理的都听过并联和串联电路,简单理解就是,串联是单行道,一旦堵塞所有车都过不去;并联是多车道,各车道独立,即使某条车道堵了,其他车道还能通行。
那这种不同的链路模式,放到工业机器人身上,还成立吗?
串联机器人和并联机器人是工业机器人家族在机构学的角度上不同的分支,他们有着各自的优势和局限,长相也大不相同,本篇给兄弟们介绍一下,让你在升级生产线的时候,不被集成商忽悠。
 第一个是串联机器人,更像人的手臂的机器人
第一个是串联机器人,更像人的手臂的机器人串联机器人是一种开式运动链机器人(可以理解为开放的链条,像一条“直链”,一环扣一环,从基座到末端没有闭合或者交叉),像人的手臂,从肩膀到手腕,每个关节依次连接,形成一条链,这样比较直观。
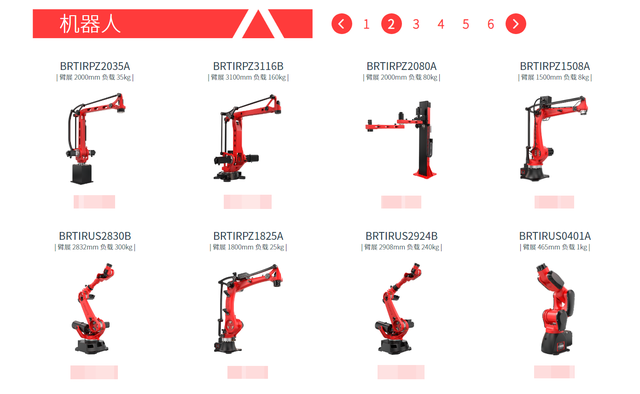
以上伯朗特产品均为多关节型串联机器人
串联机器人的结构由一系列连杆通过转动关节或移动关节串联形成。这种机器人从基座开始,通过多个刚性连杆依次连接,最终到达末端执行器(如工具或机械手)。每个连杆通常配备一个驱动器(如电机),所以四轴机器人是4个电机、六轴机器人是6个电机,通过驱动器的运动带动整个连杆的相对运动,从而实现末端执行器的定位和姿态调整。
串联机器人的特点包括:
1.结构简单:由多个刚性连杆和关节组成,设计和制造相对容易。
2.灵活性高:由于每个关节可以独立控制,因此串联机器人具有较大的工作空间和较高的灵活性,适用于复杂轨迹的运动任务。
3.自由度多:通常具有较高的自由度(如5~6轴),能够完成几乎任何角度或轨迹的操作。
4.控制复杂:由于其悬臂结构,每个关节需要支撑后续关节的重量,导致负载能力较低,且累积误差可能影响精度。
5.能耗较高:由于驱动器需要为后续连杆提供动力,因此前段连杆的驱动功率较大,整体效率较低。
串联机器人广泛应用于工业领域,如焊接、搬运、装配、喷涂等场景。
第二个是并联机器人,看起来像一只“大蜘蛛”,也叫做蜘蛛手
并联机器人是以并联方式驱动的一种闭环运动链的机器人,一般由动平台和定平台的上下运动平台和两条或者两条以上独立的运动支链相连接构成。
运动平台和运动支链之间构成一个或多个闭环机构组成的关节点坐标相互关联的机器人,通过改变各个支链的运动状态,使整个机构具有两个或者两个以上可以操作的自由度。像伯朗特机器人目前所研发的并联机器人有五自由度和六自由度。
让我们来拆分一下结构:
1.定平台(静平台):固定不动,作为整个系统的基座,通常与地面或设备主体连接。
2.动平台(动平台):可移动的末端执行器,承载工具或负载。
3.运动支链:至少两条独立的“支路”(如连杆、关节组合)将动、定平台连接,形成闭环结构。(类比三脚架固定相机:三条腿形成三角形闭环,即使单条腿轻微晃动,整体稳定性仍由闭环结构保障。)
并联机器人的特点
1.刚度高:由于多条支链的共同作用,使得并联机器人具有较高的刚性,能够承受较大的载荷。
2.精度高:由于无累积误差,其定位精度较高,适合需要高精度操作的场景。
3.速度快:并联机器人的运动速度快,能够高效完成任务。
4.结构紧凑:由于其对称的结构设计,占用空间小,适合在有限空间内工作。
5.动态响应好:由于其轻量化设计,能够快速响应控制指令。
并联机器人广泛应用于工业制造、医疗、物流仓储、食品加工、电子装配等领域。
最开头说的电路例子是帮助您理解机器人的开放链路和闭合链路,但是他们的工作原理是有显著差异的哈。
总体来看,这两类机器人有其不一样的特点和应用领域,各有千秋,用哪款机器人,主要还是看自己的产线需求。串联机器人结构更简单,控制容易、操作灵活,而并联机器人末端平台由多根杆件支撑,刚性大且结构稳定,因此在精密操作中表现出色。
