——GB 5768 .1 的附录A 应该保留
盲区虽然是个很直观的概念,而且早就“出圈”了;但有些常见的问题,“圈内”其实也没有现成的解释。 比如,车头前方就是盲区,可为什么正常行驶却毫无感觉呢?

图一 车头前方盲区
一些针对盲区隐患的措施,像“死亡弯月”、“右转必停”等,都是把盲区当成静态的。但盲区在什么时候不是问题,什么时候又会变成问题,本质上取决于如何运动。
一.盲区的动态特性
电影的标准帧率是24FPS,也就是每秒24帧画面。早期动画的帧率,有些甚至低到了6FPS。电影在屏幕上所展示的连续性,其实是因为视觉暂留(Persistence of Vision)现象,由我们自行“脑补”出来的。盲区的很多问题,也是同样的道理。
以车头前方的盲区为例,如下图所示。t0时刻的盲区(红色),在之前的t-1时刻其实是可见的;而t0时刻可见的区域(绿色),又会在t1时刻成为盲区。假设这个盲区的长度是1m,如果车速为90km/h,则每一“时刻”就是1/25秒,相当于帧率25FPS;如果车速20km/h,差不多就是6FPS。也就是说,像看电影一样的“脑补”,才是没人觉得车前存在盲区的原因。

图二盲区的动态特性
真正的盲区问题,其实都是从盲区到盲区,也就是一直都不被看见。比如下图中这个事故,小孩先是被车库的结构柱遮挡,然后是汽车的A柱盲区、再到车头盲区。不仅是t0时刻,而且在此前的t-1、t-2……,都持续处于盲区之中。

地下车库及小区停车场的大部分类似事故,车速其实都很慢。换句话说,这些事故的关键因素并不是速度,而是持续的盲区。
地下车库出口的事故频发,其中有个很重要的原因,就是坡顶盲区和车头盲区衔接在一起了。如下图所示。

图三地下车库坡顶的连续盲区
真实的情况其实更复杂。ITE交通工程手册(TEH07)有一个 “有用视野”(useful field of view)的概念,认为多数目标都能被驾驶人注意到的区域,只有20~30°(参见下图)。位于“有用视野”之外的目标即使不在盲区,驾驶人有时候也注意不到。换句话说,如果目标是从这个锥形之外的区域进入盲区,同样有可能“一直未被看见”。
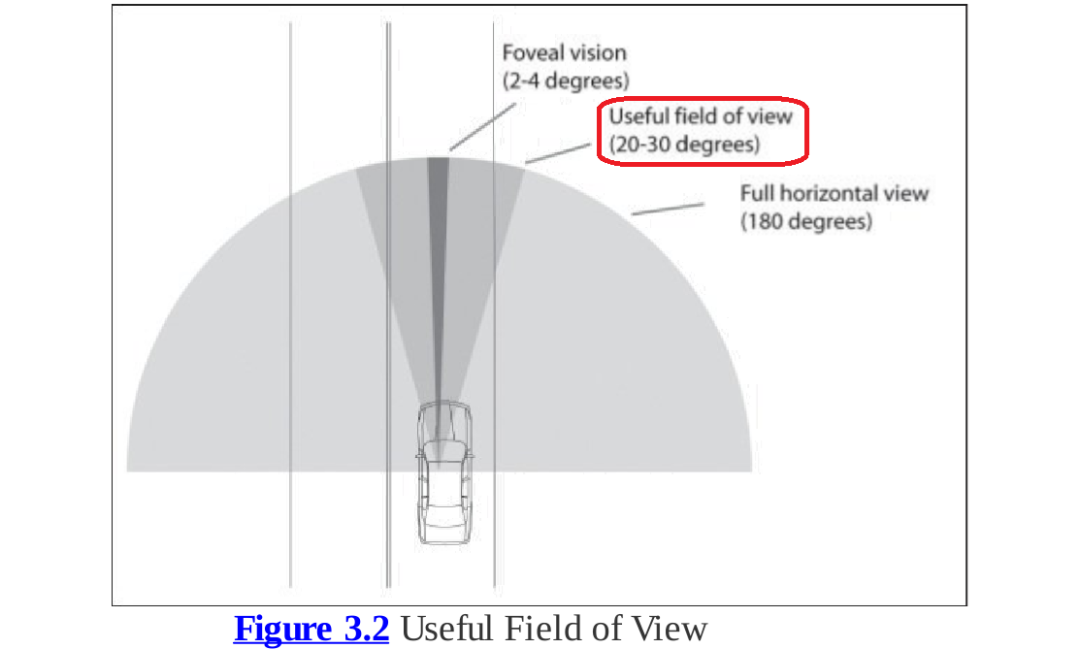
图四有用视野(TEH07)
TEH07还认为,驾驶任务越重(对注意力的需求越高),有用视野的锥度就越窄。因此,盲区问题并不只是单纯的视野问题,还和注意力的分配、以及并发的驾驶任务有关。
二.停车与盲区问题的关系
从停车状态起步是一个比较特殊的场景。如果在出发之前没有绕车一周,直接上车就起步,确实有可能疏忽了t0时刻之前的盲区状况。这也是“科目三”要求要绕车检查的原因之一。
即使是短暂的停车之后再起步,包括等红灯,也有可能遭遇到正常行驶时不会遇到的盲区问题。下面这个为捡球而爬到车底的小孩,是一个比较极端的例子。

但仅就盲区问题而言,“停车”也不见得就一定会弊大于利。在一些特殊情况下,相对运动有可能使目标一直保持在动态的盲区之中。对于这个问题,“滚动停车”(Rolling Stop)有一个现成的模型。

图五A柱盲区(Wikimedia.org)
滚动停车的意思,是指通过 “停”标志时没有“完全停车”(full stop)。上图中,南北方向由“停”标志控制,假设右侧A柱的角度是θ。如果由南向北的车辆没有完全停车,而是以速度V1“滚动”通过,当两车的速度之比V2/V1大致等于tan(θ)时,由东向西的车辆就可能会一直处于该车右侧的A柱盲区之中(参见上图)。这也是“停”标志要求完全停车的原因之一。
由此可见,盲区问题与相对运动的方向和轨迹都有关系,并不存在一个简单的答案。
三.右转必停与路权规则
“右转必停”最早出现在上海,其他城市很快就有跟进,到现在已经蔓延了大半个中国。而实施“右转必停”的原因之一,就是所谓“右转盲区”(下图)。

图六 大车“右转必停”
通常认为,在“包饺子”事故中往往存在以下两种误判之一:①行人(或非机动车·)认为这个位置碾压不到,但实际上会被碾压(内轮差);②行人以为大车能够看见自己,但实际上看不到(盲区)。
这种说法虽然有些道理,但却把路权关系搞反了。
内轮差的问题已经在通行规则与路权规则的对比研究一文中探讨过了,不再赘述。下面动图中的这些事故,实际上都发生在前轮。也就是和内轮差无关,只是单纯的盲区问题。


道交法实施条例规定:“绿灯亮时,准许车辆通行,但转弯的车辆不得妨碍被放行的直行车辆、行人通行”。也就是说,右转的大车应该避让直行的行人和非机动车,而不是相反。
但问题是,行人或者非机动车的行驶路径需要穿过大车盲区,并且有可能持续处于盲区之中。右转大车根本就不具备条件去履行“不妨碍”直行非机动车的义务,这才是“包饺子”事故的本质。
交叉口“一看二慢三通过”的通行要求,在“道交法”颁布之前持续了近40年。 “十次事故九次快”的车祸形态,以及“减速慢行”的治理口号,早已深入人心(参阅「减速慢行」其实是交通工程的失败)。因此,用“右转必停”来应对“右转盲区”,可以说是这种认知惯性的必然结果。
但如前所述,停车之后再起步,并不必然能改善盲区问题。相反,如果不存在rolling stop那种特殊的相对运动,停车反而有可能加重盲区问题。比如在新华每日电讯的这个视频中,正是因为大车没动,电动两轮车才会等候在它正前方的盲区里,以免成为“鬼探头”。
下面的法制新闻眼这个视频,也提到有祖孙俩看见大货车停了,就误以为是司机在看见她们之后让行(01:05),并因此酿成了惨剧。
由此可见,“右转必停”并没有赋予大车 “让行”的能力。事实上,在“右转必停”实施之后,就有人大代表质疑过上海市区大车“右转必停”是否必要?管理部门当时的答复是:大型货车“包饺子”事故死亡人数同比大幅下降。
“包饺子”事故的本质,是右转大车不具备履行“让行”义务的条件,“右转必停”也并没有解决这个问题。而且还有人正因为大车停了,才进入盲区并酿成事故。
虽然在“右转必停”的标志牌上,通常都写着“停车让行”或者“停车避让”(参见图六),但透过这些文字表象,可以发现实际的运行秩序其实是反的,“停车”只是便于行人和非机动车反过来避让大车。网上有很多报道都是讲交警“一把拽回”的(下图),也间接佐证了这一点。

图七 行人避让大车
如果事故的数量和伤亡确实有所下降,最有可能的原因,就是停车之后再起步的低速度,的确有利于非机动车和行人避让。但是,容许大车在不具备条件的情况下右转,进而要求有优先通行权(路权)的一方,反过来要避让右转的大车,这种无视道交法明文规定的行为,带来的破窗效应,对路权规则的普及和规则意识的养成,都是非常负面的示范。
四.路权规则的工程支撑
通行规则意义上的“路权”(right of way),指的是受交通法规保护的、维持正常行驶的权利。没有路权的一方则需要“让行”,也就是“不得妨碍”优先方的正常行驶。所谓正常行驶,指的是不必减速、刹车、转向,或者采取其他措施来避让没有路权的一方(参见基于通行规则与路权规则的对比研究)。
但是,履行路权规则的“让行”义务是需要条件的。
以“停”标志右转为例,概念模型如下。假设主路的限速是v,蓝车完成右转所需要的时间为t;那么只要不超速,红车在t期间能够行驶的最大距离就是b=vt。因此,如果以b为边长的三角形区域(下图全部灰色区域)能够通视,那么只要在t0时刻红车尚未出现在这个区域内,蓝车就能够在红车不必减速的情况下完成右转。

图八 “停”标志的视区条件
但如果有树木遮挡,通视的区域只剩下图中的深灰色三角形,蓝车就无法确保在不妨碍主线车辆的情况下完成右转。假设t0时刻红车恰好行驶到深灰色区域外面,蓝车这时起步进入路口,红车不但要减速刹车,而且避让不及还会引发事故。
由此可见,以b值为边长的通视三角区,是蓝车履行“停”标志所规定“让行”义务的必要条件。
某设计院公众号上的一篇文章,在解释“右转为何停?如何停?”的时候,引用了加州驾驶手册中,有关红灯右转必须停车之后再起步的规定,来论证“右转必停”的合理性。
该手册其实只是加州车辆法典(CVC)相关条文的概述。实际上,在红灯期间右转应该执行与 “停”标志相同的规则,这个规定在统一车辆法典(UVC)中就有。理由是,在红灯期间右转的车辆,和交叉道路上左侧的来车存在冲突,而且这个驾驶情景与“停”标志右转是完全一样的(参见图八)。与之相应的工程支撑,则是在绿皮书中规定了:对红灯允许右转的路口,应该提供与stop sign相同的左侧视区。
其实,绿灯右转的驾驶情景和红灯右转完全不同。红灯右转避让的是交叉道路上的左侧交通流,而不是在同方向右侧直行的非机动车和行人,并且也不存在盲区问题。
因此,美国的“红灯右转”规则,并不能佐证“右转必停”的合理性;相反,绿皮书为我们示范了如何为路权规则提供相应的工程支撑。
很多事故背后真正的原因,恰恰就是因为缺少了这样的支撑。
比如,道交法实施条例规定了行经路口时不得超车。但在下图中的场景,皮卡车(红框)完全无法预见前方有路口。更重要的是,这个事故中的各方当事人,基于各自的视角(而非上帝视角),其实都没有犯错。

这次事故背后真正的原因,是主路上并没有提供 “交叉口识别距离”(请参阅一个概念造成的混乱),以至于直行的皮卡车无从遵循“不得超车”的规定。有关这个事故的具体分析,详见基于通行规则与路权规则的对比研究一文。
2004年道交法颁布实施,开启了向路权规则为基础的交通秩序转变的进程。但路权规则需要有相应的工程支撑,这个应该成为常识的认知却没有同步形成。最直接的原因,是工程规范并没有因为“道交法”的改变而有所调整。而原因背后的原因,则是几何设计及交通工程相关标准的编写人员,囿于工程一隅,对技术规范和路权规则之间的依存关系,缺乏必要的认知。
“交叉口识别距离”这个概念,在D20中演变成了含义模糊的“引道视距”之后,就完全丧失了“确保驾驶人提前意识到交叉口存在”的本意。交叉口引道上的控制设施设置逻辑,也因此而变得面目全非(参见一个概念造成的混乱)。在不具备“识别距离”的类似的路口,“不得超车”的规定其实仅仅是事故之后定责的工具,根本就不可能实际执行。
五.让常识成为共识
路线规范从最初的版本(JTJ011-84)至今(JTG D20-2017),对交叉口通视区的要求一直都和控制方式无关(参见为什么说JTG D20的通视三角区逻辑混乱?)。这个事实说明,现行规范体系在底层逻辑上,和路权规则就是割裂的。
以绿灯左转为例,道交法实施条例的规定是“不得妨碍被放行的直行车辆”。显然,如果要较真履行这个“不妨碍”的义务,就需要提前足够的距离观察到对向来车。但D20对交叉口通视区的规定,却一直都只限于道路外侧(下图左侧),并没有包含中分带。也就是说,D20并没有为绿灯左转提供工程支撑。

图九规范的通视区并不支持允许左转
直到2023年,也就是道交法颁布实施之后近20年,才有一份“技术指南”补充了这个左转通视区。但遗憾的是,补充的这个通视区(上图右侧)仍然与实施条例规定的路权规则不匹配(请参阅基于通行规则与路权规则的对比研究一文)。
而且在2023年的这份技术指南中,灯控路口的通视要求(下图左侧)仍然不支持“道交法”红灯右转的通行规则。红灯时按“停”标志的规则右转所必须的通视区域(下图左侧黄色三角区),并未包含在内。而且现行的道交法还没有要求红灯时“右转必停”,需要的通视区其实更大。

图十 红灯右转的条件 与 禁止红灯右转
绿灯右转及无控路口的右转,都需要“让行”右侧直行的非机动。这里隐含着一个很重要的问题,就是非机动道的限速。如果在右转车道的右侧是一条快车道,这样的右转规则就根本无法执行。

要是允许,甚至要求摩托车在非机动车道上混行(下图),姑且不论速差问题,在与沿途各种“允许右转”进入的通道(driveways)交叉时,实际上就是一条位于右转车道右侧的快车道。

图十一要求摩托车走非机动车道的标志
无论非机动车道的几何条件如何,以及与机动车道是否隔离甚至独立,道交法都“一刀切”的规定了一个15km/h的限速。这样的规定,执行起来显然有困难。国标电动自行车的速度提升、以及进一步提速的呼声,对于和机动车道“允许右转”的通道存在交叉的各种非机动车道,视距视区的检查、以及非机动车道的速度管理,都将是很大的挑战。
更重要的是,道路条件应该和路权规则相互匹配的认知,需要尽快成为常识。否则,类似问题的增量还会越积越多。
比较而言,路权规则与工程规范之间的逻辑关系,在美国就要清晰得多。
以红灯右转为例。UVC规定了红灯时右转应该遵循stop sign的规则,几何设计规范(绿皮书)的配套要求是:在红灯允许右转的路口,必须提供与stop sign相同的左侧视区;而控制设施规范(MUTCD)则规定了:如果对左侧来车的视距不足,或者事故多发(unacceptable number) ,就应该使用R10-11“禁止红灯右转”(参见图十)。
这里边的逻辑很清晰:默认红灯允许右转,但不具备条件时则要禁止。即:必须为红灯右转提供相应的工程支撑;如果做不到,就应该禁止这种转向。
各国的做法虽然不尽相同,但背后的逻辑其实是一致的。有的国家是默认禁止,但在有需要且具备条件的路口可以通过标志来允许,比如新加坡(参见图十右侧,新加坡是左行制)。还有一些国家则干脆一禁了之,比如英国。
说回“右转必停”,逻辑其实同样简单:如果无法提供 “让行”所必须的条件,就根本不应该允许大车这样右转。
六.有关GB5768.1附录A的一些问题
GB5768.1-2009有一个规范性附录,为GB5768规定之外的标志标线的应用,制定了相应的程序。从研究申请的报备、成果评议、通过后在一定范围试用、再到标准修订,之后才能普遍使用。

图十二GB5768.1的附录A
但在2024版的“征求意见稿”中,这个附录A被废止了。理由之一,是“自 2009 年版实施以来,仅有一例申请。”
但“仅有一例”的原因,并不是因为这种情形很少。恰恰相反,与GB5768规定不符的各种“创新”随处可见,只是没人遵循这个程序。
附录A的本质,是为了维护控制设施的“统一性”(uniformity)。按照MUTCD的说法,对控制设施的效用而言,统一性是至关重要的(vital)。然而在当下,附录A的作用远不止于此。
以“右转必停”为例。“包饺子”事故的根本原因,其实是右转大车轨迹与直行的非机动车道相交的角度,使大车不具备避让直行非机动车的视区条件。
专业的思路大致应该是:①能否外移非机动车道以改变交叉角度(参见基于通行规则与路权规则的对比研究)?②能否通过箭头灯在时间上将右转大车与直行非机动车(行人)分开?
STM介绍有两种专用右转相位。其一是配合交叉方向对应的左转相位设置,这样对其他交通流的运行几乎没有影响;其二,如果需要在信号周期中专门增加一个相位,就应该评估安全收益和其他交通流的效率损失。
控制方法的选择,受制于路口的几何特征、交通流的分布及组成,以及事故类型、数量等因素。在不同的约束条件下,各方向交通流之间以及与安全之间的平衡,不同的控制方法会有不同的结果。所以,有的路口可能更适合设置专用右转相位,有的甚至可以禁止或者部分时段禁止大车右转,等等。因此,即便假定“右转必停”是一项有效的控制措施,也只会适用于特定的场景。
但现实情况是,“右转必停”至今都没有任何相关的适用准则(warrant),却已经遍地开花了。有些路口仅凭车道布设,就能判断 “右转必停”会有问题。比如,上海法制报的上海市区大车“右转必停”是否必要一文,就报道了在有两条右转车道的路口,也实施了大车“右转必停”;因为停着的大车遮挡了旁边车道的视野,导致“鬼探头”事故发生。
在标线渠化岛分离、甚至物理隔离的右转专用道上,有些也在实施大车“右转必停”。右转轨迹与人行横道的交叉角度接近垂直,且视野良好(下图),在这种情况下,要求大车即使在没有行人的时候,也必须先停车再起步,究竟是为了什么?

图十三 渠化岛分离的右转车道上“右转必停”
如果能够按照附录A的程序,经过报备、成果评议、试用,待标准修订之后再推广;最起码会有基本的适用准则,怎么也不会乱到这种程度。
交通工程的诸多常识,在行业内并未成为共识。在这种情况下,GB5768.1的附录A更加不能废止,相反,应该做的是加大管理力度。
