傻瓜式高效机械臂助手。
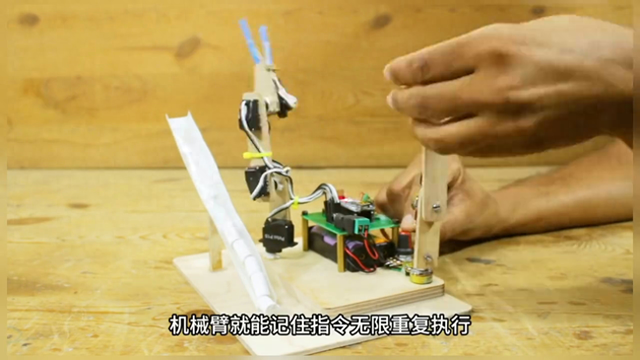
只需操控臂杆抓取物品任务一次,机械臂就能记住指令无限重复执行,省略繁琐编程简单高效帮你工作。
·准备好木板根据需要切割三块长度适中的上中下支臂,把这两颗舵机安装在中臂镂空区域,它们负责中臂与上臂关节活动。
·再对下臂木块进行钻孔,通过螺丝将下臂与舵机之间连接,上支臂同样按此操作与中臂连接,从而实现中上臂关节活动功能。
·然后用双面胶在上臂固定舵机,它负责控制物品抓放动作,而下臂舵机负责机臂旋转。一共四颗舵机来完成所有工作,它们依靠Arduino进行控制,每颗舵机连线分配一个插孔独立驱动。
·接着是控制操控杆的电位器,广泛应用于家电相当于旋钮开关。这三颗电位器安装方式和机械臂相同,分别对应舵机关节和机臂旋转,另外一颗固定在基座上对应抓手。
·当旋转电位器时电阻值被改变,电压输入到Arduino被读取为电信号,Arduino根据电信号位置转换为PWM信号,并输出到舵机将旋转角度与电位器位置保持一致,从而实现同位联动。

·而抓手结构来自带有弹性的约束带,它被固定在上臂最前端,并将线绳捆绑在舵机上,通过底座电位器对其控制,而摇杆负责机械臂升降和旋转。
·如果要设置新任务只需按下开关,Arduino会记录当前臂杆信号并存储在内存中。
简单快捷重复刚才的动作极为高效。
