大家好,今天一起来了解电动相变致动器如何为软体机器人设计提供动力。
*本文只做阅读笔记分享*
一、研究背景与现状
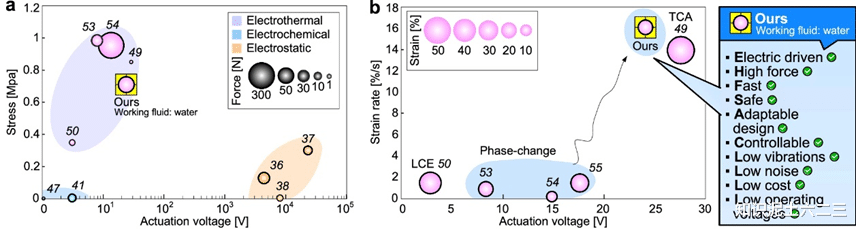
在追求电动软体致动器的过程中,人们的关注点从液-气相变转向静电和其他电热驱动方式。这是因为液-气相变存在应变率低、驱动延迟等问题。但其实液-气相变致动器有其独特优势,像低电压运行、可控性好、可扩展性强以及易于集成到机器人中等,只是之前这些优势未得到充分利用。
二、设计准则
要开发高性能液-气相变致动器,需重新审视以往设计概念。设计注重高热通量能力和模块化。
工作流体采用散装存储,避免惰性基质带来的热质量;加热元件与流体直接接触,减少热阻;通过内部导体直接为加热元件供电,简化系统并减少无线传输损耗。
线性致动器设计了两个冗余状态变量传感器,不过后来发现基于压力的控制更好,所以弯曲致动器就没装温度传感器,让设计更简单。同时,也考虑到了设计的可靠性问题,采用模块化设计和整体式弹性体结构来解决。

三、驱动原理
软体致动器内流体的沸腾近似于池沸腾。当加热元件表面温度高于流体局部饱和温度,气泡就会产生、长大并脱离。在亚冷却池沸腾阶段,气泡会在到达液体表面前崩溃,产生类似空化的现象,导致压力冲击波,这不仅会影响致动器的完整性,还会引发机械振动。
为避免这些问题,让致动器在整个驱动周期都保持热力学饱和状态。另外,当蒸汽气泡过多合并形成气层,将加热元件与液体隔开时,会达到临界热通量(CHF),这限制了致动器的加压速率。

四、工作流体选择
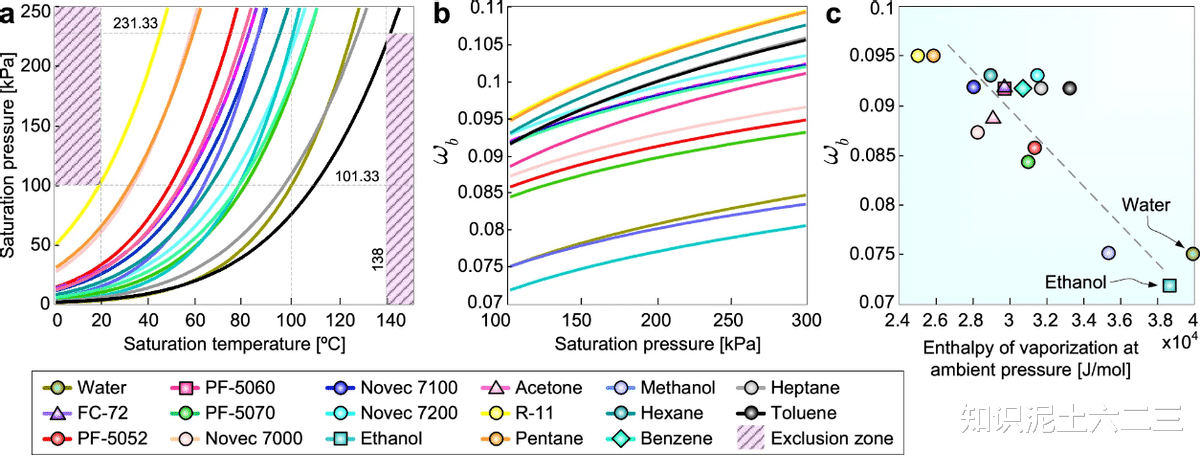
选择合适的工作流体对优化致动器性能很关键。研究人员提出了四步选择法:
第一步,根据期望的致动器工作压力和温度范围筛选流体,排除在常温常压下不是液体的,以及超过特定温度和压力范围的流体,比如R-11和甲苯;
第二步,评估流体与材料的兼容性,排除会使硅酮和天然橡胶膨胀、扩散的氟基流体和乙醇,水的扩散率较低,更适合;
第三步,评估流体的安全性、毒性和可持续性,水在这方面表现较好;
第四步,用边界工作系数(ωb)对流体进行基准测试,综合考虑各种因素,最终选择水作为工作流体。
五、弹性体硬度的影响
致动器模块化设计使不同组件相对独立,这能根据应用需求选择弹性体材料。
研究人员制作了四个几何相同但弹性体不同的线性致动器进行测试,结果发现材料硬度越低,力斜率越大,且较软的弹性体在增加位移方面比增加力更明显。
所以,后续线性致动器选用了最软的Ecoflex00-30材料,而弯曲致动器为保证刚度,选用了硬度较高的Smooth-Sil940材料。

六、性能极限
为评估设计极限,我们对线性软致动器进行等距冲击测试。在测试中,致动器能达到100kPa/s的加压速率,在210kPa时因超压失效,但加热元件未烧毁,说明此时可能未达到CHF条件。通过实验还发现,散热速率是限制致动器性能的一个重要因素。
七、控制策略
以往的液-气相变致动器常用PI和ON-OFF控制器,反馈信号多样。但对于高功率致动器,选择合适的反馈信号很关键。对比了基于温度和压力的控制方式,发现温度信号滞后,所以压力反馈更合适。
此外,通过设置高于大气压的最低待机压力,进行预热,可以有效减少控制滞后、增加加压速率并降低压力振荡幅度。最终确定20kPa为待机压力,并采用非线性控制策略,结合ON-OFF控制器和PI控制器,使致动器能更好地达到目标压力或位移。

八、机器人原型
研究人员开发了三种机器人原型,展示这种致动器的应用潜力。
一是由三个线性软致动器驱动的仿生手,通过尼龙线和滑轮系统控制手指关节,能抓取不同形状和大小的物体,但手指开合速度受散热速率限制;
二是由三个弯曲致动器驱动的电动软抓手,制作效率高,能成功完成抓取和放置任务;
三是名为Bixo的电动软四足机器人,由液-气相变致动器驱动,可执行复杂的运动任务,如攀爬管道和在树干上爬行,其运动周期会随着压力变化而逐渐稳定。

九、总结与展望
这项研究揭示了高功率电动液-气相变致动器的潜力,设计的致动器加压速率超100kPa/s,收缩应变率超16%/s,还提出了工作流体选择方法和非线性控制策略。
不过,该技术也面临一些挑战,如标准化困难、散热速率限制、使用寿命未知等。未来可通过增加致动器的面积与体积比或提高工作压力范围来改善减压速率,但这也会带来新的问题。
尽管电热软驱动存在效率限制,但液-气相变软致动器的性能和适应性为软体机器人发展带来了新机遇。
今天的分享就到这里,希望大家对这种致动器有了更清晰的认识。
十、一起来做做题吧
1、关于电动驱动软致动器,下列说法正确的是( )
A. 静电致动器通常比电热致动器工作电压更低
B. 电热致动器因高应变率而不适用于高速应用
C. 本文聚焦的液 - 气相变致动器以水为工作流体,由线圈式柔性加热元件驱动
D. 液 - 气相变致动器不存在性能快速退化的问题
2、在选择工作流体时,以下不属于排除氟基流体和乙醇的原因的是( )
A. 它们会使硅酮和天然橡胶膨胀和扩散
B. 它们的闪点低,存在火灾隐患
C. 水通过硅酮的扩散速率更低,致动器寿命更长
D. 它们会导致致动器产生更多的机械振动
3、在致动器软结构材料选择的实验中,以下结论错误的是( )
A. 较软的弹性体材料制成的致动器在等长测试中产生的力更大
B. 较软的弹性体材料制成的致动器在等张测试中位移增加更明显
C. 线性致动器最终选择 Ecoflex 00 - 30 材料是因为其硬度最低
D. 弯曲致动器选择 Smooth - Sil 940 材料是为了确保足够的刚度
参考文献:
Fonseca, D., Neto, P. Electrically-driven phase transition actuators to power soft robot designs. Nat Commun 16, 3920 (2025).
