本期拆解带来的是enabot赋之科技推出的EBO SE智能陪伴机器人,这款机器人在机身底部设有传动轮组,内部设有电池,摆脱了充电线的限制,支持在平面上自由移动,可进入床底,沙发底部等区域。
机器人具备红外夜视功能,通过使用手机或平板电脑进行远程操控,实现全面查看。机器人设有充电底座,通过红外线引导进行自主回充。下面充电头网就带来赋之科技EBO SE智能陪伴机器人的拆解,一起看看内部的方案和设计。
赋之科技EBO SE智能陪伴机器人开箱
机器人包装盒采用蓝色基调,左侧印有enabot品牌,下方印有EBO SE型号,右侧印有机器人示意图。

背面印刷了产品使用场景和产品主要特点。

包装内部包含机器人、充电底座、适配器和说明书。

机器人为不倒翁设计,设有黑色装饰条,内部隐藏红外接收头,底部设有传动轮组。

机器人前部设有摄像头。

机器人前部摄像头特写。

在机器人顶部设有麦克风标识和麦克风开孔。

机器人背面设有TF卡槽和扬声器开孔。

在机器人底部设有传动轮组。

传动履带印有狗爪图案。

传动轮组印有产品型号和电源输入等信息,上方设有固定螺丝。

复位按键特写。

机器人充电触点特写。

测得机器人机身直径约为95mm。

机器人高度约为91.3mm。

机器人拿在手上的大小直观感受。

测得机器人重量约为280g。

机器人充电底座一览。

充电底座设有红外发射器和充电触点。

用于机器人自主回充的红外发射器特写。

充电底座中间位置设有充电触点。

充电底座背面设有胶垫用于粘贴定位。

充电底座印有型号Ebo C Charging Stand,输入输出规格均为5V2A。

充电底座设有凹陷用于穿过电源线。

测得电源线长度约为1米。

充电底座通过螺丝固定。

底座顶部设有充电指示灯。

测得充电底座重量约为107g。

机器人返回充电底座充电形态一览。
卡针粘贴固定在说明书上。

卡针尖头用于机器人开关机,扁头用于拆下底部轮组进行清理。

机器人附带USB充电器,为国标两脚插头。

充电器来自飞天鹰,支持100-240V输入,输出为5V2A。

充电器设有USB-A接口。
赋之科技EBO SE智能陪伴机器人拆解看完了EBO SE这款智能陪伴机器人的开箱展示,下面就进行拆解,一起看看内部的方案和设计。

首先拧下固定螺丝,拆下机器人底部的传动轮组。

传动轮组为独立的结构,便于拆卸清理。

传动轮组另一面设有弹簧顶针用于连接机身。

连接机身的弹簧顶针特写。
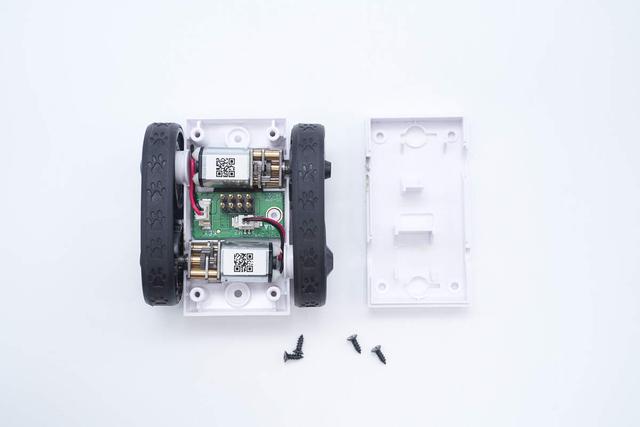
拧下外壳的固定螺丝,拆开传动轮组。

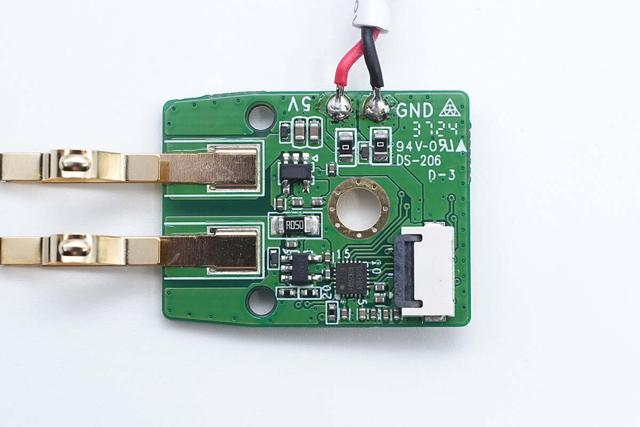
传动轮组内部设有两个减速电机和一小块PCB板。

减速电机通过插接件连接到PCB板。

拆解取出传动轮组内部减速电机和PCB板。
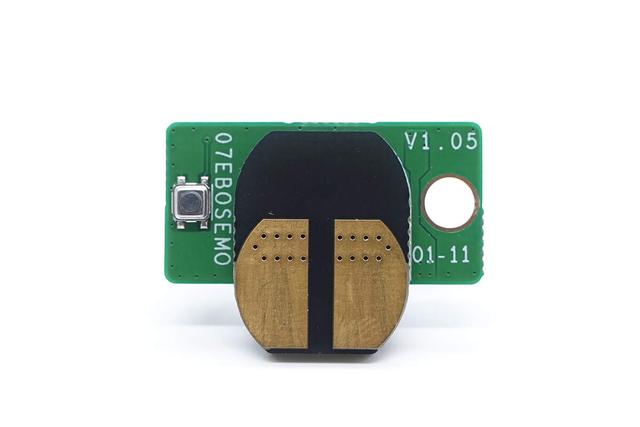
PCB板背面设有充电触点。

边缘设有复位按键。

小板另一面设有弹簧顶针和连接插座。

连接机身的弹簧顶针特写。

用于机器人运动的减速电机特写。

电机接线焊接处打胶加固。

机器人内部一览,内部设有排线触点用于连接底部传动轮组,固定螺丝贴有防拆标签。

拧开固定螺丝拆开机器人外壳,上下两部分通过排线连接。

排线连接器粘贴铜箔胶带屏蔽。

铜箔下面覆盖传感器连接排线插座。

连接机身底部的排线和连接图像传感器的排线特写。

连接其他传感器的排线特写。

麦克风通过插接件连接。

电池和NTC热敏电阻通过插接件连接。

拧下固定螺丝拆下摄像头主板。

摄像头主板正面设有主控芯片,无线连接模块和PMIC,边缘设有红外接收头用于回充定位。

背面设有电池充电芯片,TF卡槽和连接器。

摄像机主控芯片来自SigmaStar星宸科技,型号SSC333,芯片内部集成Cortex-A7处理器,支持300W像素传感器,支持H.264和H.265视频编码,内部集成64MB DDR2内存,采用QFN-88封装。

芯片外置24.000MHz时钟晶振特写。

存储器来自武汉新芯,型号XM25QH128D,容量为16MB,采用SOP8L封装。

无线连接模组特写,采用瑞昱半导体RTL8811CU芯片,芯片支持2.4G和5G双频段,设有USB2.0接口,采用QFN56封装。

芯片外置的40.000MHz时钟晶振特写。

连接WiFi天线的触点特写。

PMIC来自芯源系统,型号MP5416,芯片内置4路同步降压转换器和5路LDO,支持2.8-5.5V输入电压,输出电压和供电时序可通过I2C或OTP设置,芯片支持欠压保护,过流保护和过热保护,采用QFN28封装。

主控MCU来自小华半导体,型号HC32L130F8UA,芯片内部集成Cortex-M0+内核,主频为48MHz,芯片内部集成64KB FLASH和8KB RAM,支持1.8-5.5V工作电压,采用QFN32封装。

电机驱动芯片来自矽力杰,丝印BGS,型号SY6703,芯片支持2.5-16V供电,内部集成两个H桥,支持两个直流电机或一个步进电机驱动,采用QFN4*4-16封装。

两颗10mΩ电阻用于检测电机电流。

扬声器功放来自艾为,丝印KHL4,型号AW87559FCR,芯片内部集成高压同步自适应升压为D类功率级供电,采用FCQFN2*3-20L封装。
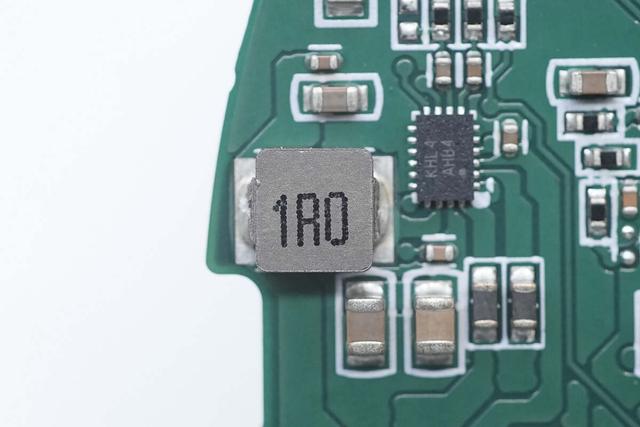
搭配使用的1μH升压电感特写。

红外LED驱动芯片来自矽力杰,丝印EF,型号SY8703,是一颗30V输入电压的降压LED驱动器,开关频率为1MHz,输出电流1A,采用SOT23-6封装。

搭配使用的47μH电感特写。

电池充电芯片来自立锜科技,丝印8Q=,型号RT9471D,是一颗3A充电电流的同步降压充电芯片,支持13.5V输入电压,支持OTG功能,支持功率路径管理,采用WQFN24L封装。

芯片外置的功率电感特写。

电池计量芯片来自立锜科技,丝印80,型号RT9426A,外置取样电阻,具备I2C接口,用于电池百分比计量,采用WLCSP9封装,右下方设有电流取样电阻。

六轴陀螺仪芯片来自意法半导体,型号LSM6DS3TR-C,内部集成3D数字加速度计和3D数字陀螺仪,采用LGA-14L封装。

滤波电容来自永铭,为VPX系列贴片固态电容,规格为1000V 6.3V。
贴片红外接收头用于检测充电底座角度,共设有五颗进行机器人回充定位。
贴片焊接的TF卡槽特写。

连接底部小板和传感器的连接器特写。

连接状态指示灯和红外发射LED的连接器特写。

连接电池的连接器特写。

连接NTC热敏电阻的连接器特写。

壳体内部设有传感器模组、麦克风和WiFi天线。

传感器通过排线连接,支架内部固定摄像头。

WiFi天线通过粘贴固定。

麦克风通过胶水粘贴固定。

拧下固定螺丝,拆下外层的半透明罩子。

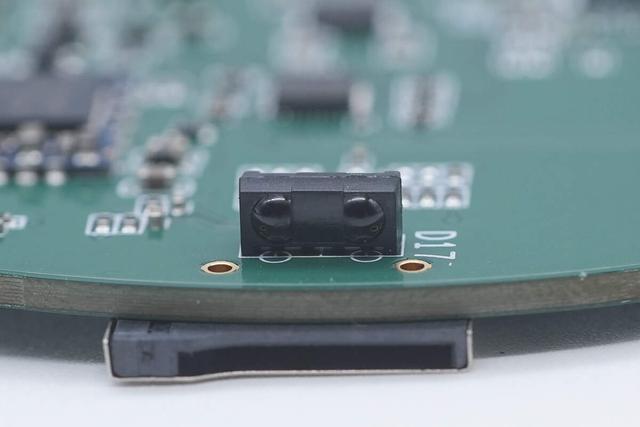
摄像头上方为左侧为WiFi和相机指示灯区域,右侧为心形指示灯,摄像头下方左右两侧设有红外夜视二极管,下方设有距离传感器。

从壳体内部取出传感器模组。

壳体内部传感器模组一览。

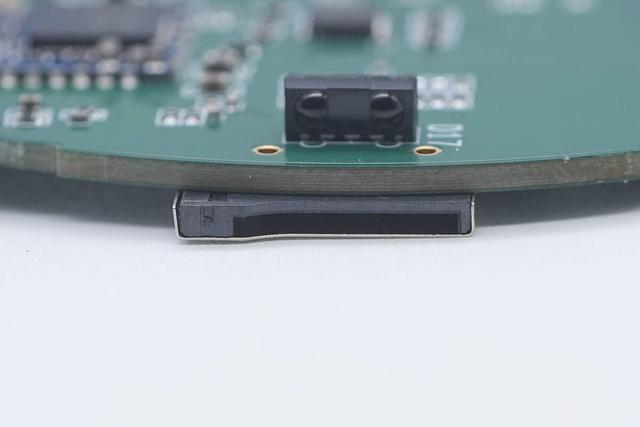
底部设有距离传感器,用于防碰撞辅助功能。

用于夜视功能的红外发射二极管特写。

另一颗红外发射二极管特写。

左上角两颗LED状态灯特写。

右上角RGB LED特写。

摄像头传感器特写。

摄像头传感器背面粘贴导电布。

机器人底部设有PCB小板。

排线连接到底部小板。

连接传动轮组的排线特写。

扬声器通过插接件连接。

用于检测轮组转动的霍尔元件也通过排线连接。

排线连接到传动轮组。

拆解机器人底部的电池等配件,电池使用塑料支架固定。
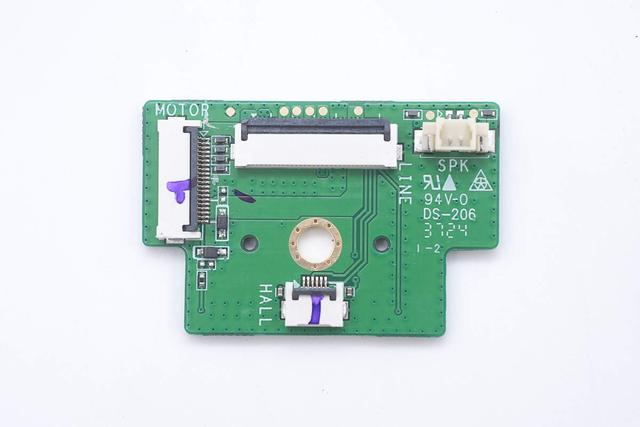
底部小板设有排线连接器。

小板背面没有元件。

机身内部设有两块配重铁块。

连接上下两块PCBA模块的排线特写。

外壳上设有霍尔排线和扬声器。

用于检测电机转动的霍尔元件丝印HG4cS。

另一颗霍尔元件型号相同。

扬声器通过螺丝固定。

电池包裹泡棉缓冲减震。

可充式锂电池电池组
型号:A0716
充电限制电压:4.2V
标称电压:3.6V
额定容量:2450mAh
额定能量:8.82Wh
惠州亿纬锂能股份有限公司

电池另一侧印有EVE标识。

热敏电阻使用胶带粘贴固定。

热敏电阻探头特写。

电池正负极均粘贴绝缘纸。

电池镍带粘贴胶带固定。

电池保护板通过镍带点焊连接。

电池负极点焊镍带连接。

电池来自EVE亿纬锂能,型号INR18650/26V,额定电压为3.6V,容量为2.55Ah,充电限制电压为4.2V。

电池保护板设有电池保护芯片,电池保护管和保险丝,其中电池保护芯片和电池保护管打胶密封。

保护板背面没有焊接元件。

电池保护芯片丝印51864。

保护管来自长晶科技,型号CJS9004,双NMOS,耐压20V,导阻7.5mΩ,采用TSSOP8封装。

正极设有自恢复保险丝。
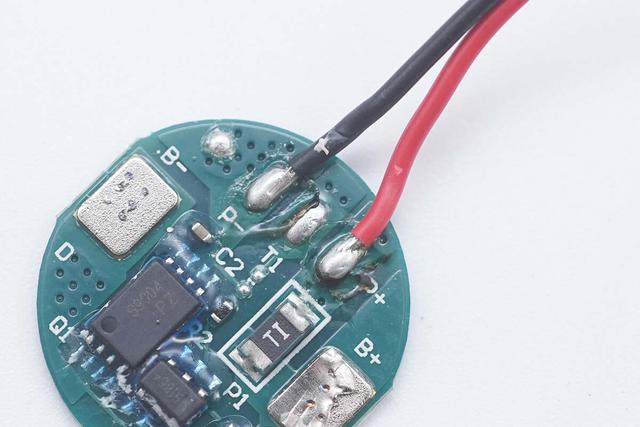
正负极导线通过焊接连接,焊点饱满圆润。

最后来拆解机器人充电底座,拧下底部的固定螺丝,拆下后盖。

底座内部用于充电的小板特写,采用螺丝固定,焊接导线和充电触点。

继续拆解取出顶部的红外线发射小板。
底部的充电小板特写,设有MCU,稳压芯片和运放芯片。

小板背面没有元件。

充电底座内置MCU来自小华半导体,型号HC32F005C6UA,芯片内部集成Cortex-M0+内核,主频为32MHz,芯片内部集成32KB FLASH和4KB RAM,支持1.8-5.5V工作电压,采用QFN20封装。
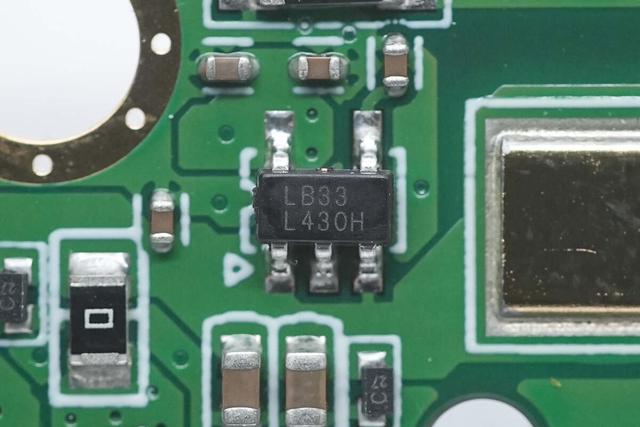
为MCU供电的稳压芯片来自润石,型号RS3236-3.3,支持7.5V输入电压,输出电压为3.3V,输出电流500mA,采用SOT23-5封装。

用于机器人充电电流检测的运放来自思瑞浦,丝印21A,型号LM321A,采用SOT23封装。

电源输入导线通过焊接连接。

用于连接顶部小板的连接器特写。

用于为机器人充电的触点特写。

红外线发射小板设有塑料遮光罩。

小板设有排线连接器。

小板正面设有驱动管,限流电阻,红外LED和双色LED。

小板背面没有元件。

三颗红外LED配合机器人机身的红外线接收器实现回充定位功能。

双色LED用于机器人充电指示。

全部拆解一览,来张全家福。
充电头网拆解总结
最后附上赋之科技EBO SE智能陪伴机器人的核心物料清单,方便大家查阅。
赋之科技EBO SE智能陪伴机器人采用不倒翁设计,底部设有传动轮组,支持手机APP远程操控,能够在家中自由移动。机器人内置电池,配有充电底座,能够定时巡航并且自动返回充电底座充电。机器人内置摄像头,支持高清夜视功能,还具备麦克风和扬声器,支持双向对讲。
充电头网通过拆解了解到,EBO SE智能陪伴机器人采用星辰科技SSC333主控芯片,瑞昱RTL8811CU用于无线连接,芯源系统MP5416用于为摄像头芯片供电。小华半导体HC32L130F8UA用于机器人控制,使用矽力杰SC6703用于机器人底部传动轮组电机驱动,SY8703用于红外夜视LED驱动。
在机器人内部还设有18650电池组,来自亿纬锂能,规格为3.6V2.55Ah。立锜科技RT9471D用于电池充电,RT9426A用于电池电量计量。扬声器功放采用艾为AW87559FCR,意法半导体LSM6DS3TR-C陀螺仪用于机器人姿态检测。机器人内部通过排线和插接件连接,简化生产流程,便于产线组装。
