为了在计算出矩阵 $L^{(1)}, L^{(2)}, \ldots, L^{(n-1)}$ 的同时,计算出矩阵 $π^{(1)}, π^{(2)}, \ldots, π^{(n-1)}$,我们需要修改 EXTEND-SHORTEST-PATHS 和 SLOW-ALL-PAIRS-SHORTEST-PATHS 函数。这些修改将确保在更新最短路径权重的同时,我们也更新前驱节点信息。
以下是使用 Go 语言实现的代码:
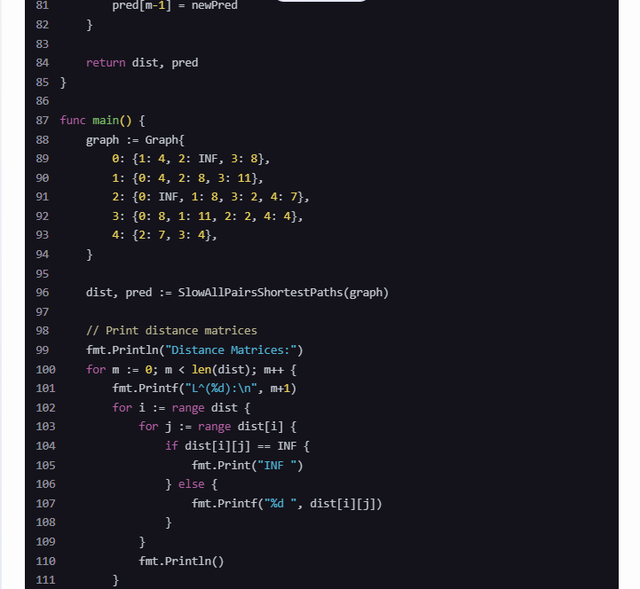
package mainimport("fmt""math")const INF = math.MaxInt32// Vertex represents a vertex in the graphtypeVertexint// Graph represents a graph with weightstypeGraphmap[Vertex]map[Vertex]int// PredecessorMatrix represents the predecessor matrixtypePredecessorMatrix[][]Vertex// ExtendShortestPaths updates the shortest path lengths and predecessorsfunc ExtendShortestPaths(graph Graph, dist [][]int, pred PredecessorMatrix, m int){ n :=len(graph)for i :=0; i < n; i++{for j :=0; j < n; j++{if dist[i][j]< INF {for k :=0; k < n; k++{if dist[i][k]+graph[k][j]< dist[i][j]{ dist[i][j]= dist[i][k]+ graph[k][j] pred[i][j]= pred[i][k]}elseif dist[i][k]+graph[k][j]== dist[i][j]&& m >1{// If there's a tie and we're allowing more than one edge, we can keep the existing predecessor// or choose the new one (in a real-world scenario, we might need a more sophisticated tie-breaking strategy)// Here, we just keep the existing predecessor for simplicity}}}}}}// SlowAllPairsShortestPaths computes the shortest path lengths and predecessors for all pairsfunc SlowAllPairsShortestPaths(graph Graph)([][]int,[]PredecessorMatrix){ n :=len(graph) dist :=make([][]int, n) pred :=make([]PredecessorMatrix, n-1)// Initialize distance matrixfor i :=range dist { dist[i]=make([]int, n)for j :=range dist[i]{if i == j { dist[i][j]=0}else{ dist[i][j]= INF}}}// Initialize predecessor matrixfor i :=range pred { pred[i]=make(PredecessorMatrix, n)for j :=range pred[i]{ pred[i][j]=make([]Vertex, n)for k :=range pred[i][j]{ pred[i][j][k]=-1// -1 indicates no predecessor} pred[i][j][i]= i // Self-loop has itself as predecessor}}// Build the L^(m) and π^(m) matricesfor m :=1; m < n; m++{ newPred :=make(PredecessorMatrix, n)for i :=range newPred { newPred[i]=make(PredecessorMatrix, n)for j :=range newPred[i]{ newPred[i][j]=make([]Vertex, n)copy(newPred[i][j], pred[m-1][i][j])}}ExtendShortestPaths(graph, dist, newPred, m) pred[m-1]= newPred}return dist, pred}func main(){ graph :=Graph{0:{1:4,2: INF,3:8},1:{0:4,2:8,3:11},2:{0: INF,1:8,3:2,4:7},3:{0:8,1:11,2:2,4:4},4:{2:7,3:4},} dist, pred :=SlowAllPairsShortestPaths(graph)// Print distance matrices fmt.Println("Distance Matrices:")for m :=0; m <len(dist); m++{ fmt.Printf("L^(%d):\n", m+1)for i :=range dist {for j :=range dist[i]{if dist[i][j]== INF { fmt.Print("INF ")}else{ fmt.Printf("%d ", dist[i][j])}} fmt.Println()} fmt.Println()}// Print predecessor matrices fmt.Println("Predecessor Matrices:")for m :=0; m <len(pred); m++{ fmt.Printf("π^(%d):\n", m+1)for i :=range pred[m]{for j :=range pred[m][i]{if pred[m][i][j]==-1{ fmt.Print("nil ")}else{ fmt.Printf("%d ", pred[m][i][j])}} fmt.Println()} fmt.Println()}}解释1. Graph Representation:• 使用一个嵌套 map 来表示图,其中 Graph 类型的键和值分别表示顶点和该顶点相邻顶点的权重。2. ExtendShortestPaths Function:• 这个函数更新从每个顶点 i 到每个其他顶点 j 的最短路径长度和前驱节点。• 它通过检查所有可能的中间顶点 k 来更新最短路径。• 如果找到一条更短的路径,则更新距离和前驱节点。• 如果路径长度相同且允许超过一条边(m > 1),则保持当前前驱节点(或根据特定策略选择新的前驱节点)。3. SlowAllPairsShortestPaths Function:• 初始化距离矩阵 dist 和前驱矩阵 pred。• 使用 EXTEND-SHORTEST-PATHS 函数逐步构建 L^(m) 和 π^(m) 矩阵。• 在每次迭代中,都会创建新的前驱矩阵 newPred 以存储当前迭代的结果。4. Main Function:• 创建一个示例图并调用 SlowAllPairsShortestPaths 函数来计算最短路径和前驱矩阵。• 打印结果。注意• 代码中的 INF 表示无穷大,用于初始化距离矩阵中表示不可达的路径。• 前驱矩阵使用 -1 表示没有前驱(即路径的起点或不可达的顶点)。• 打印结果时,INF 被格式化为字符串 "INF",前驱 -1 被格式化为字符串 "nil"。
在这里插入图片描述

在这里插入图片描述

在这里插入图片描述
在这里插入图片描述

在这里插入图片描述

在这里插入图片描述
讯飞星火:为了实现这个功能,我们需要修改经典的 Floyd-Warshall 算法。Floyd-Warshall 算法用于计算所有顶点对之间的最短路径。我们可以通过在算法中添加一个额外的矩阵来记录每个节点的前驱节点。
以下是使用 Go 语言实现的代码:
package mainimport("fmt""math")const INF = math.MaxFloat64func floydWarshall(graph [][]float64)([][]float64,[][]int){ n :=len(graph) dist :=make([][]float64, n)next:=make([][]int, n)for i :=range graph { dist[i]=make([]float64, n)next[i]=make([]int, n)for j :=range graph[i]{ dist[i][j]= graph[i][j]if graph[i][j]!= INF && i != j {next[i][j]= j}else{next[i][j]=-1}}}for k :=0; k < n; k++{for i :=0; i < n; i++{for j :=0; j < n; j++{if dist[i][k]+dist[k][j]< dist[i][j]{ dist[i][j]= dist[i][k]+ dist[k][j]next[i][j]=next[i][k]}}}}return dist,next}func printPath(u, v int, next [][]int){ifnext[u][v]==-1{ fmt.Println("No path")return} path :=[]int{u}for u != v { u =next[u][v] path =append(path, u)} fmt.Println("Path:", path)}func main(){ graph :=[][]float64{{0,3, INF,5},{2,0, INF,4},{INF,1,0, INF},{INF, INF,2,0},} dist,next:= floydWarshall(graph) fmt.Println("Shortest distance matrix:")for _, row :=range dist { fmt.Println(row)} fmt.Println("\nNext node matrix:")for _, row :=rangenext{ fmt.Println(row)}// Example to print the path from node 0 to node 3 printPath(0,3,next)}解释:1. 初始化:我们首先初始化两个矩阵 dist 和 next。dist 存储从节点 i 到节点 j 的最短距离,而 next 存储从节点 i 到节点 j 的最短路径上的下一个节点。如果 i 和 j 之间没有直接连接,则 next[i][j] 设置为 -1。2. 更新距离和前驱节点:通过三重循环,我们更新 dist 和 next 矩阵。如果通过中间节点 k 可以缩短从 i 到 j 的距离,我们就更新 dist[i][j] 和 next[i][j]。3. 打印路径:printPath 函数根据 next 矩阵打印从节点 u 到节点 v 的路径。如果没有路径,则输出 "No path"。4. 主函数:在 main 函数中,我们定义了一个图并调用 floydWarshall 函数来计算最短距离矩阵和前驱节点矩阵,然后打印它们。最后,我们演示了如何打印从节点 0 到节点 3 的路径。360智脑:好的,我们可以修改 EXTEND-SHORTESTPATHS 和 SLOW-ALL-PAIRS-SHORTEST-PATHS 算法,使其在计算最短路径权重的同时,计算每个节点的前驱矩阵。以下是用 Go 语言实现的代码:
定义结构体和函数首先,我们需要定义一些基本的结构体和辅助函数。
package mainimport("fmt""math")const INF = math.MaxInt32typeGraphstruct{ n int w [][2]int}func NewGraph(n int)*Graph{return&Graph{n: n, w:make([][2]int, n*n)}}func (g *Graph)SetWeight(i, j, weight int){ g.w[i*g.n+j]=[2]int{i, weight}}func (g *Graph)GetWeight(i, j int)int{return g.w[i*g.n+j][1]}func (g *Graph)GetPredecessor(i, j int)int{return g.w[i*g.n+j][0]}func (g *Graph)ExtendShortestPaths(L, P [][2]int)([],[][2]int){ n := g.nLPrime:=make([][2]int, n*n)PPrime:=make([][2]int, n*n)for i :=0; i < n; i++{for j :=0; j < n; i++{LPrime[i*n+j]=[2]int{INF,-1}for k :=0; k < n; k++{if L[i*n+k][1]+g.GetWeight(k, j)<LPrime[i*n+j][1]{LPrime[i*n+j]=[2]int{j, L[i*n+k][1]+ g.GetWeight(k, j)}PPrime[i*n+j]=[2]int{k, j}}}}}returnLPrime,PPrime}func (g *Graph)SlowAllPairsShortestPaths()([][2]int,[][][2]int){ n := g.n L :=make([][2]int, n*n) P :=make([][][2]int, n)for i :=0; i < n; i++{for j :=0; j < n; j++{if i == j { L[i*n+j]=[2]int{j,0}}elseif g.GetWeight(i, j)!= INF { L[i*n+j]=[2]int{j, g.GetWeight(i, j)} P[0][i*n+j]=[2]int{i, j}}else{ L[i*n+j]=[2]int{j, INF}}}}for m :=1; m < n-1; m++{ L, P[m]= g.ExtendShortestPaths(L, P[m-1])}return L, P}func main(){ n :=4 graph :=NewGraph(n) graph.SetWeight(0,3,-2) graph.SetWeight(1,0,4) graph.SetWeight(1,2,3) graph.SetWeight(2,1,1) graph.SetWeight(3,1,5) graph.SetWeight(3,2,7) L, P := graph.SlowAllPairsShortestPaths() fmt.Println("L:")for i :=0; i < n; i++{for j :=0; j < n; j++{ fmt.Printf("%d ", L[i*n+j][1])} fmt.Println()} fmt.Println("P:")for m :=0; m < n-1; m++{ fmt.Printf("P^(%d):\n", m+1)for i :=0; i < n; i++{for j :=0; j < n; j++{ fmt.Printf("(%d, %d) ", P[m][i*n+j][0], P[m][i*n+j][1])} fmt.Println()}}}解释1. Graph 结构体:表示图,包含节点数 n 和权重矩阵 w。2. SetWeight 和 GetWeight 方法:设置和获取图中边的权重。3. GetPredecessor 方法:获取前驱节点。4. ExtendShortestPaths 方法:扩展最短路径,同时计算前驱矩阵。5. SlowAllPairsShortestPaths 方法:计算所有节点对之间的最短路径及其前驱矩阵。6. main 函数:创建图并调用 SlowAllPairsShortestPaths 方法,打印结果。这个实现会在计算最短路径权重的同时,计算每个节点的前驱矩阵。希望这对你有帮助!
智谱清言:在Go语言中,我们可以通过扩展原有的最短路径算法来同时计算最短路径上的前驱结点。下面是修改后的EXTEND-SHORTESTPATHS和SLOW-ALL-PAIRS-SHORTEST-PATHS算法的实现。 首先,定义一个结构体来存储路径长度和前驱结点:
type PathInfo struct { Distance int Predecessor int}然后,实现EXTEND-SHORTESTPATHS函数:
func EXTEND_SHORTESTPATHS(L []PathInfo, W [][]int, n int) []PathInfo{// 创建一个新矩阵来存储更新后的路径信息 newL :=make([]PathInfo, n)for i :=0; i < n; i++{ newL[i]=PathInfo{Distance: math.MaxInt32,Predecessor:-1}}// 更新路径信息for i :=0; i < n; i++{for j :=0; j < n; j++{for k :=0; k < n; k++{if L[j].Distance!= math.MaxInt32&& W[j][k]!= math.MaxInt32&& L[j].Distance+ W[j][k]< newL[k].Distance{ newL[k].Distance= L[j].Distance+ W[j][k] newL[k].Predecessor= j}}}}return newL}接下来,实现SLOW-ALL-PAIRS-SHORTEST-PATHS函数:
package mainimport("math")func SLOW_ALL_PAIRS_SHORTEST_PATHS(W [][]int, n int)([][]PathInfo,[][]int){ L :=make([][]PathInfo, n) II :=make([][]int, n)// 存储前驱结点矩阵// 初始化L[0]和II[0] L[0]=make([]PathInfo, n) II[0]=make([]int, n)for i :=0; i < n; i++{for j :=0; j < n; j++{if i == j { L[0][i]=PathInfo{Distance:0,Predecessor:-1} II[0][i]=-1}else{ L[0][j]=PathInfo{Distance: W[i][j],Predecessor: i} II[0][j]= i}}}// 计算L[1]到L[n-1]for m :=1; m < n; m++{ L[m]= EXTEND_SHORTESTPATHS(L[m-1], W, n) II[m]=make([]int, n)for i :=0; i < n; i++{ II[m][i]= L[m][i].Predecessor}}return L, II}func main(){// 示例权重矩阵 W :=[][]int{{0,3,8, math.MaxInt32,-4},{math.MaxInt32,0, math.MaxInt32,1,7},{math.MaxInt32,4,0, math.MaxInt32, math.MaxInt32},{2, math.MaxInt32,-5,0, math.MaxInt32},{math.MaxInt32, math.MaxInt32, math.MaxInt32,6,0},} n :=len(W) L, II := SLOW_ALL_PAIRS_SHORTEST_PATHS(W, n)// 输出结果for m :=0; m < n; m++{ fmt.Printf("L[%d]:\n", m)for i :=0; i < n; i++{ fmt.Printf("Distance from 0 to %d: %d, Predecessor: %d\n", i, L[m][i].Distance, L[m][i].Predecessor)} fmt.Printf("II[%d]: %v\n", m, II[m])}}这段代码实现了计算所有点对之间的最短路径及其前驱结点的功能。L矩阵存储了最短路径的长度和前驱结点,而II矩阵只存储了前驱结点。在主函数中,我们定义了一个示例权重矩阵W,并调用SLOW_ALL_PAIRS_SHORTEST_PATHS函数来计算最
天工:以下是使用Go语言修改EXTEND - SHORTESTPATHS和SLOW - ALL - PAIRS - SHORTEST - PATHS函数以同时计算最短路径权重矩阵L和前驱矩阵Ⅱ的示例代码:
package mainimport("fmt""math")// 表示无穷大const INF = math.MaxInt32// EXTEND - SHORTESTPATHS函数的修改版func EXTEND - SHORTESTPATHS(L [][]int, II [][][]int, W [][]int)([][]int,[][][]int){ n :=len(L)LNew:=make([][]int, n)IINew:=make([][][]int, n)for i :=rangeLNew{LNew[i]=make([]int, n)IINew[i]=make([][](int), n)for j :=rangeLNew[i]{LNew[i][j]= INFIINew[i][j]=make([]int,0)for k :=0; k < n; k++{if L[i][k]+W[k][j]<LNew[i][j]{LNew[i][j]= L[i][k]+ W[k][j]IINew[i][j]=[]int{k}}elseif L[i][k]+W[k][j]==LNew[i][j]{IINew[i][j]=append(IINew[i][j], k)}}}}returnLNew,IINew}// SLOW - ALL - PAIRS - SHORTEST - PATHS函数的修改版func SLOW - ALL - PAIRS - SHORTEST - PATHS(W [][]int)([][]int,[][][]int){ n :=len(W) L :=make([][]int, n) II :=make([][][]int, n)for i :=range L { L[i]=make([]int, n) II[i]=make([][](int), n)for j :=range L[i]{ L[i][j]= W[i][j]if i!= j && L[i][j]< INF { II[i][j]=[]int{i}}else{ II[i][j]=make([]int,0)}}}for m :=2; m < n; m++{ L, II = EXTEND - SHORTESTPATHS(L, II, W)}return L, II}你可以使用以下方式调用这些函数:
func main() {// 示例权重矩阵W W :=[][]int{{0,3, INF,7},{8,0,2, INF},{5, INF,0,1},{2, INF, INF,0},} L, II := SLOW - ALL - PAIRS - SHORTEST - PATHS(W)// 输出最短路径权重矩阵L fmt.Println("最短路径权重矩阵L:")for _, row :=range L {for _, num :=range row {if num == INF { fmt.Printf("INF ")}else{ fmt.Printf("%d ", num)}} fmt.Println()}// 输出前驱矩阵II fmt.Println("前驱矩阵II:")for _, row :=range II {for _, subRow :=range row { fmt.Printf("%v ", subRow)} fmt.Println()}}1. EXTEND - SHORTESTPATHS函数• 这个函数接受当前的最短路径权重矩阵L、前驱矩阵II和权重矩阵W。• 对于每一对节点(i, j),它遍历中间节点k,计算L[i][k]+W[k][j]。• 如果这个值小于当前的LNew[i][j],则更新LNew[i][j]为这个新值,并将IINew[i][j]设置为[k](表示k是j的前驱)。• 如果这个值等于当前的LNew[i][j],则将k添加到IINew[i][j]中(因为可能有多个最短路径)。• 最后返回更新后的最短路径权重矩阵LNew和前驱矩阵IINew。2. SLOW - ALL - PAIRS - SHORTEST - PATHS函数• 这个函数首先初始化最短路径权重矩阵L和前驱矩阵II为输入的权重矩阵W。• 对于从2到n - 1的m,它调用EXTEND - SHORTESTPATHS函数来逐步更新L和II。• 最后返回计算得到的最短路径权重矩阵L和前驱矩阵II。3. main函数• 这里创建了一个示例的权重矩阵W。• 调用SLOW - ALL - PAIRS - SHORTEST - PATHS函数得到最短路径权重矩阵L和前驱矩阵II。• 然后分别输出L和II。chatgpt:好的,这项任务涉及到在计算最短路径的同时,通过动态规划方法维护每个节点的前驱信息。以下是两个需要修改的算法的简化版本,EXTEND-SHORTESTPATHS 和 SLOW-ALL-PAIRS-SHORTEST-PATHS,它们将同时计算最短路径和前驱矩阵。代码是用 Go 语言实现的。
1. EXTEND-SHORTESTPATHSEXTEND-SHORTESTPATHS 是一个用于更新从源节点到所有其他节点的最短路径的算法,可以在每次扩展时记录前驱节点。
package mainimport("fmt""math")// 定义图的结构typeEdgestruct{ u, v, weight int}// EXTEND-SHORTESTPATHS 函数,计算从起始节点 s 到其他节点的最短路径func EXTEND_SHORTEST_PATHS(graph [][]int, s int, m int)([][]int,[][]int){ n :=len(graph) L :=make([][]int, n)// 存储最短路径权重π:=make([][]int, n)// 存储前驱信息for i :=range L { L[i]=make([]int, n)π[i]=make([]int, n)for j :=range L[i]{ L[i][j]= math.MaxInt32// 初始化为正无穷大π[i][j]=-1// 前驱初始化为-1}} L[s][s]=0// 从起始节点到自身的路径权重为0for k :=1; k <= m; k++{for u :=0; u < n; u++{for v :=0; v < n; v++{if graph[u][v]!= math.MaxInt32{// 如果存在边 u->vif L[k-1][u]+graph[u][v]< L[k][v]{ L[k][v]= L[k-1][u]+ graph[u][v]π[k][v]= u}}}}}return L,π}func main(){// 示例图的邻接矩阵 (表示边的权重,数学无穷大表示没有边) graph :=[][]int{{0,1, math.MaxInt32, math.MaxInt32},{math.MaxInt32,0,2,3},{math.MaxInt32, math.MaxInt32,0,1},{math.MaxInt32, math.MaxInt32, math.MaxInt32,0},} m :=3// 最多包含的边的数量 s :=0// 起始节点 L,π:= EXTEND_SHORTEST_PATHS(graph, s, m) fmt.Println("Shortest path weights:")for i :=range L { fmt.Println(L[i])} fmt.Println("Predecessor nodes:")for i :=rangeπ{ fmt.Println(π[i])}}2. SLOW-ALL-PAIRS-SHORTEST-PATHSsLOW-ALL-PAIRS-SHORTEST-PATHS 通常会使用 Floyd-Warshall 算法来计算所有节点之间的最短路径,并维护前驱信息。
package mainimport("fmt""math")// SLOW-ALL-PAIRS-SHORTEST-PATHS 函数,计算所有节点对之间的最短路径func SLOW_ALL_PAIRS_SHORTEST_PATHS(graph [][]int)([][]int,[][]int){ n :=len(graph) L :=make([][]int, n)// 存储最短路径权重π:=make([][]int, n)// 存储前驱信息for i :=range L { L[i]=make([]int, n)π[i]=make([]int, n)for j :=range L[i]{ L[i][j]= graph[i][j]if i != j && graph[i][j]< math.MaxInt32{π[i][j]= i // 如果存在边,设置前驱为i}else{π[i][j]=-1// 不存在边的前驱为-1}}}for k :=0; k < n; k++{for i :=0; i < n; i++{for j :=0; j < n; j++{if L[i][k]+ L[k][j]< L[i][j]{ L[i][j]= L[i][k]+ L[k][j]π[i][j]=π[k][j]// 更新前驱为走过的点k}}}}return L,π}func main(){// 示例图的邻接矩阵 graph :=[][]int{{0,3, math.MaxInt32,7},{8,0,2, math.MaxInt32},{5, math.MaxInt32,0,1},{2, math.MaxInt32, math.MaxInt32,0},} L,π:= SLOW_ALL_PAIRS_SHORTEST_PATHS(graph) fmt.Println("All pairs shortest path weights:")for i :=range L { fmt.Println(L[i])} fmt.Println("All pairs predecessor nodes:")for i :=rangeπ{ fmt.Println(π[i])}}说明:1. 数据结构:• graph 是一个邻接矩阵表示的图,其中 math.MaxInt32 表示不存在的边。• L 是最短路径权重矩阵,π 是前驱矩阵。2. 算法过程:• 在EXTEND_SHORTEST_PATHS中,使用动态规划 approach 根据边的数量 k 逐渐更新最短路径和前驱信息。• 在 SLOW_ALL_PAIRS_SHORTEST_PATHS 中,使用 Floyd-Warshall 算法同时更新所有节点对之间的最短路径以及前驱数据。3. 输出结果:• 最短路径权重和前驱信息被打印出来,便于验证。你可以根据具体场景和数据测试这些代码并调整它们。
kimi:要解决这个问题,我们需要修改两个算法:EXTEND-SHORTESTPATHS 和 SLOW-ALL-PAIRS-SHORTEST-PATHS,以便它们在计算最短路径权重矩阵的同时,也能计算出前驱矩阵。以下是修改后的算法描述和Go语言实现。
修改后的算法描述1. EXTEND-SHORTESTPATHS(G, L, Π, k):• 对于图中的每条边 (u, v) 权重为 w(u, v):• 更新 L[u][v] = L[u][k] + w(u, v)。• 更新 Π[u][v] = k。• 如果 L[u][v] > L[u][k] + w(u, v),则:• 输入: 图 G,最短路径权重矩阵 L,前驱矩阵 Π,当前考虑的边数 k。• 输出: 更新后的最短路径权重矩阵 L 和前驱矩阵 Π。• 过程:2. SLOW-ALL-PAIRS-SHORTEST-PATHS(G):• 初始化 L 和 Π 为 n×n 矩阵,其中 n 是图中顶点的数量。• 对于每个顶点 i:• 对于 k 从 1 到 n-1:• 设置 L[i][j] = ∞ 和 Π[i][j] = nil。• 设置 L[i][i] = 0。• 对于每个顶点 j ≠ i:• 调用 EXTEND-SHORTESTPATHS(G, L, Π, k)。• 输入: 图 G。• 输出: 最短路径权重矩阵 L 和前驱矩阵 Π。• 过程:Go语言实现package mainimport"fmt"typeGraphstruct{ edges [][]int weight [][]int}typeMatrixstruct{ data [][]int}func NewGraph(n int)*Graph{return&Graph{ edges:make([][]int, n), weight:make([][]int, n),}}func (g *Graph)AddEdge(u, v, w int){ g.edges[u]=append(g.edges[u], v) g.weight[u]=append(g.weight[u], w)}func NewMatrix(n int)*Matrix{return&Matrix{ data:make([][]int, n),}}func (m *Matrix)Init(n int){for i :=range m.data { m.data[i]=make([]int, n)}}func (m *Matrix)Set(i, j, val int){ m.data[i][j]= val}func (m *Matrix)Get(i, j int)int{return m.data[i][j]}func EXTENDSHORTESTPATHS(g *Graph, L *Matrix, Π *Matrix, k int){for u :=range g.edges {for _, v :=range g.edges[u]{ w := g.weight[u][g.edges[u].Index(v)]if L.Get(u, v)> L.Get(u, k)+w { L.Set(u, v, L.Get(u, k)+w)Π.Set(u, v, k)}}}}func SLOWALLPAIRSSHORTESTPATHS(g *Graph)(*Matrix,*Matrix){ n :=len(g.edges) L :=NewMatrix(n).Init(n)Π:=NewMatrix(n).Init(n)for i :=range L.data {for j :=range L.data[i]{if i == j { L.Set(i, j,0)}else{ L.Set(i, j,1<<30)// Use a large number to represent infinityΠ.Set(i, j,-1)}}}for k :=1; k < n; k++{ EXTENDSHORTESTPATHS(g, L,Π, k)}return L,Π}func main(){ g :=NewGraph(4) g.AddEdge(0,1,1) g.AddEdge(0,2,2) g.AddEdge(1,2,1) g.AddEdge(1,3,1) g.AddEdge(2,1,1) g.AddEdge(2,3,1) L,Π:= SLOWALLPAIRSSHORTESTPATHS(g) fmt.Println("Shortest Path Weights Matrix L:")for _, row :=range L.data { fmt.Println(row)} fmt.Println("Predecessor Matrix Π:")for _, row :=rangeΠ.data { fmt.Println(row)}}这段代码定义了一个图结构,添加边和权重的方法,以及两个矩阵结构来存储最短路径权重和前驱信息。EXTEND-SHORTESTPATHS 和 SLOW-ALL-PAIRS-SHORTEST-PATHS 函数被实现为Go语言函数,它们计算最短路径权重和前驱矩阵。最后,main 函数创建一个示例图,调用这些函数,并打印结果矩阵。
混元:为了实现这个功能,我们需要修改 EXTEND-SHORTEST-PATHS 和 SLOW-ALL-PAIRS-SHORTEST-PATHS 算法,以便在计算最短路径权重矩阵 $L^{(m)}$ 的同时,计算出前驱矩阵 $\Pi^{(m)}$。
以下是用 Go 语言实现的代码:
package mainimport("fmt""math")// 初始化距离矩阵和前驱矩阵func initializeMatrices(n int)([][]float64,[][]int){ L :=make([][]float64, n) II :=make([][]int, n)for i :=range L { L[i]=make([]float64, n) II[i]=make([]int, n)for j :=range L[i]{if i == j { L[i][j]=0}else{ L[i][j]= math.Inf(1)} II[i][j]=-1}}return L, II}// 更新最短路径和前驱矩阵func extendShortestPaths(L, II [][]float64, W [][]float64){ n :=len(L)for k :=0; k < n; k++{for i :=0; i < n; i++{for j :=0; j < n; j++{if L[i][k]+W[k][j]< L[i][j]{ L[i][j]= L[i][k]+ W[k][j] II[i][j]= II[k][j]}}}}}// 计算所有对的最短路径和前驱矩阵func slowAllPairsShortestPaths(W [][]float64)([][]float64,[][]int){ n :=len(W) L, II := initializeMatrices(n)// 初始化 L 和 II 为直接连接的权重和前驱for i :=0; i < n; i++{for j :=0; j < n; j++{if W[i][j]!= math.Inf(1){ L[i][j]= W[i][j] II[i][j]= i}}}// 计算 L^(1) 到 L^(n-1)for m :=2; m <= n; m++{Lm:=make([][]float64, n) II :=make([][]int, n)for i :=rangeLm{Lm[i]=make([]float64, n) II[i]=make([]int, n)copy(Lm[i], L[i])copy(II[i], II[i])} extendShortestPaths(Lm, II, L) L =Lm}return L, II}func main(){// 示例权重矩阵 W W :=[][]float64{{0,3, math.Inf(1),7},{8,0,2, math.Inf(1)},{5, math.Inf(1),0,1},{2, math.Inf(1), math.Inf(1),0},} L, II := slowAllPairsShortestPaths(W) fmt.Println("最短路径权重矩阵 L:")for _, row :=range L { fmt.Println(row)} fmt.Println("前驱矩阵 II:")for _, row :=range II { fmt.Println(row)}}解释1. initializeMatrices: 初始化距离矩阵 $L$ 和前驱矩阵 $\Pi$。2. extendShortestPaths: 更新最短路径和前驱矩阵。3. slowAllPairsShortestPaths: 计算所有对的最短路径和前驱矩阵。4. main: 示例权重矩阵 $W$,并调用 slowAllPairsShortestPaths 函数计算最短路径权重矩阵 $L$ 和前驱矩阵 $\Pi$。通过这种方式,我们可以在计算最短路径权重矩阵的同时,计算出前驱矩阵。
